Der Schrittwinkel eines Schrittmotors bezieht sich auf den Winkel, den der Motor bei jedem Bewegungsschritt dreht, normalerweise ausgedrückt in Grad. Dieser Winkel wird durch die Konstruktion und Herstellung des Motors bestimmt und verschiedene Schrittmotoren haben unterschiedliche Schrittwinkel. Zu den üblichen Schrittwinkeln gehören 1,8 Grad, 0,9 Grad, 0,45 Grad, 0,36 Grad usw., wobei 1,8 Grad am häufigsten vorkommt.
Der Schrittwinkel hängt mit der Auflösung und Genauigkeit des Motors zusammen. Je kleiner der Schrittwinkel, desto höher die Auflösung und Genauigkeit, aber auch die Schwierigkeit und die Kosten der Steuerung. Bei der Auswahl eines Schrittmotors ist es daher notwendig, die spezifischen Anforderungen der Anwendung zu berücksichtigen.

Der Schrittwinkel eines Schrittmotors hat einen wichtigen Einfluss auf die Leistung des Motors, was sich vor allem in folgenden Aspekten widerspiegelt:
1.Auflösung:Die Auflösung eines Schrittmotors hängt von der Schrittwinkelgröße ab. Je kleiner der Schrittwinkel ist, desto höher ist die Genauigkeit und Auflösung des Motors. Ein 0,9-Grad-Motor hat beispielsweise eine doppelt so hohe Auflösung wie ein 1,8-Grad-Motor.
2.Geschwindigkeit:Die Geschwindigkeit eines Schrittmotors hängt auch mit dem Schrittwinkel zusammen. Je kleiner der Schrittwinkel ist, desto höher ist die maximale Geschwindigkeit des Motors bei gleicher Spannung und Antriebsart.
3.Dynamische Reaktion:Die dynamische Reaktionsfähigkeit eines Schrittmotors wird auch durch den Schrittwinkel beeinflusst. Je kleiner der Schrittwinkel ist, desto schneller reagiert der Motor auf das Steuersignal und desto besser sind die dynamischen Eigenschaften.
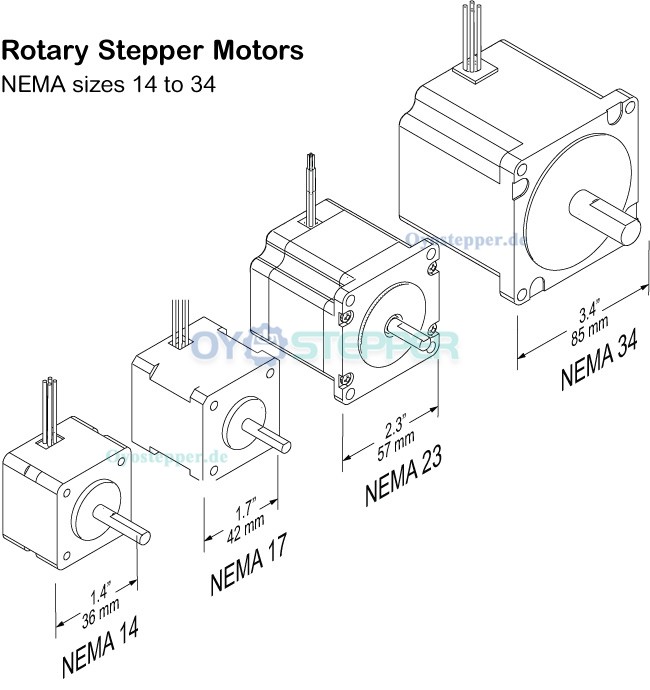
In der Anfangszeit waren die meisten der verwendeten 0,9°-Schrittwinkelmotoren Nema 23-Schrittmotoren oder Single-Stack-Nema 34-Rahmenmotoren, die eine geringere Stromstärke hatten. Der geringere Strom führt zu einem weniger gesättigten Stahlblech, was in einigen praktischen Anwendungen zu Erfolgen geführt hat.

Bei der Auswahl des Schrittwinkels des Schrittmotors erfordern unterschiedliche Anwendungsszenarien unterschiedliche Schrittwinkel, und der geeignete Schrittwinkel sollte entsprechend den tatsächlichen Anwendungsanforderungen ausgewählt werden. Darüber hinaus kann der Schrittwinkel des Schrittmotors auch durch Ändern des Betriebsmodus des Motortreibers geändert werden, um den Anforderungen verschiedener Anwendungsszenarien gerecht zu werden.


.jpg)



